Не забудьте ознакомиться с общими (черновик) правилами проведения категории «Здесь и сейчас»
Категория «Здесь и сейчас»
Динамика_1 |
Динамика_2 |
Динамика_3 |
 |
 |
 |
| Движение робота с использованием алгоритмов расчетов точных перемещений и датчиков для ориентации на поле. |
Движение робота по заданной трассе, с выполнением дополнительных заданий на ней. | Выбор маршрута движения робота исходя из его положения на поле, вводимых данных и анализа расположения элементов на поле. |
| Форма проведения: очно Необходимое оборудование: мобильный робот, датчики расстояния, освещенности (цвета), касания, дополнительный мотор |
Форма проведения: очно Необходимое оборудование: мобильный робот, датчики расстояния, освещенности (цвета), касания, дополнительный мотор |
Форма проведения: очно Необходимое оборудование: мобильный робот, датчики расстояния, освещенности (цвета), касания, дополнительный мотор |
| Регламент Макет | Регламент Макеты | Регламент Макет |
Алгоритмика |
 |
| Ввод данных разными способами, последующая их обработка и демонстрация результата. Задания выполняются с использованием стационарного робототехнического устройства. |
| Форма проведения: очно Необходимое оборудование: два мотора с энкодерами или два сервопривода, датчик расстояния, датчик освещенности, экран, не менее двух датчиков касания или двух кнопок. |
| Регламент Макет |
Электроника |
| Основы схемотехники, работа с базовыми электронными компонентами. |
| Форма проведения: очно Необходимое оборудование: Большая макетная плата; набор источников питания; держатели для элементов питания; набор проводов штекер-штекер; набор резисторов ряда Е12; набор светодиодов синий, красный, зеленый, белый; фоторезистор – 2 шт; потенциометр 10 кОм – 2 шт; набор кнопок, выключатель, переключатель; набор логических элементов «И», «ИЛИ», «НЕ»; мультиметр. Более подробное описание и количество элементов в регламенте |
| Регламент |
Регламенты на апробации
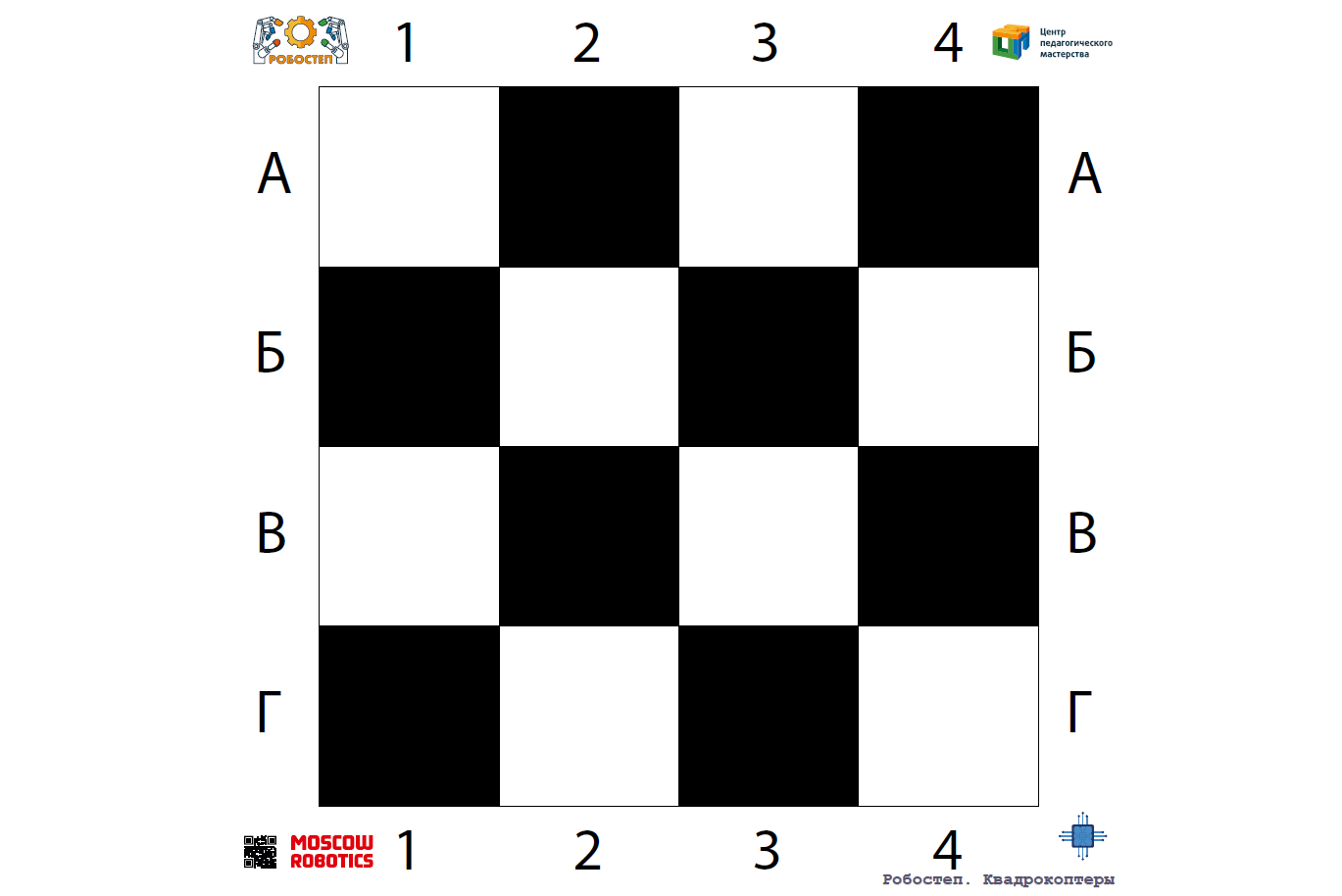
Квадрокоптеры |
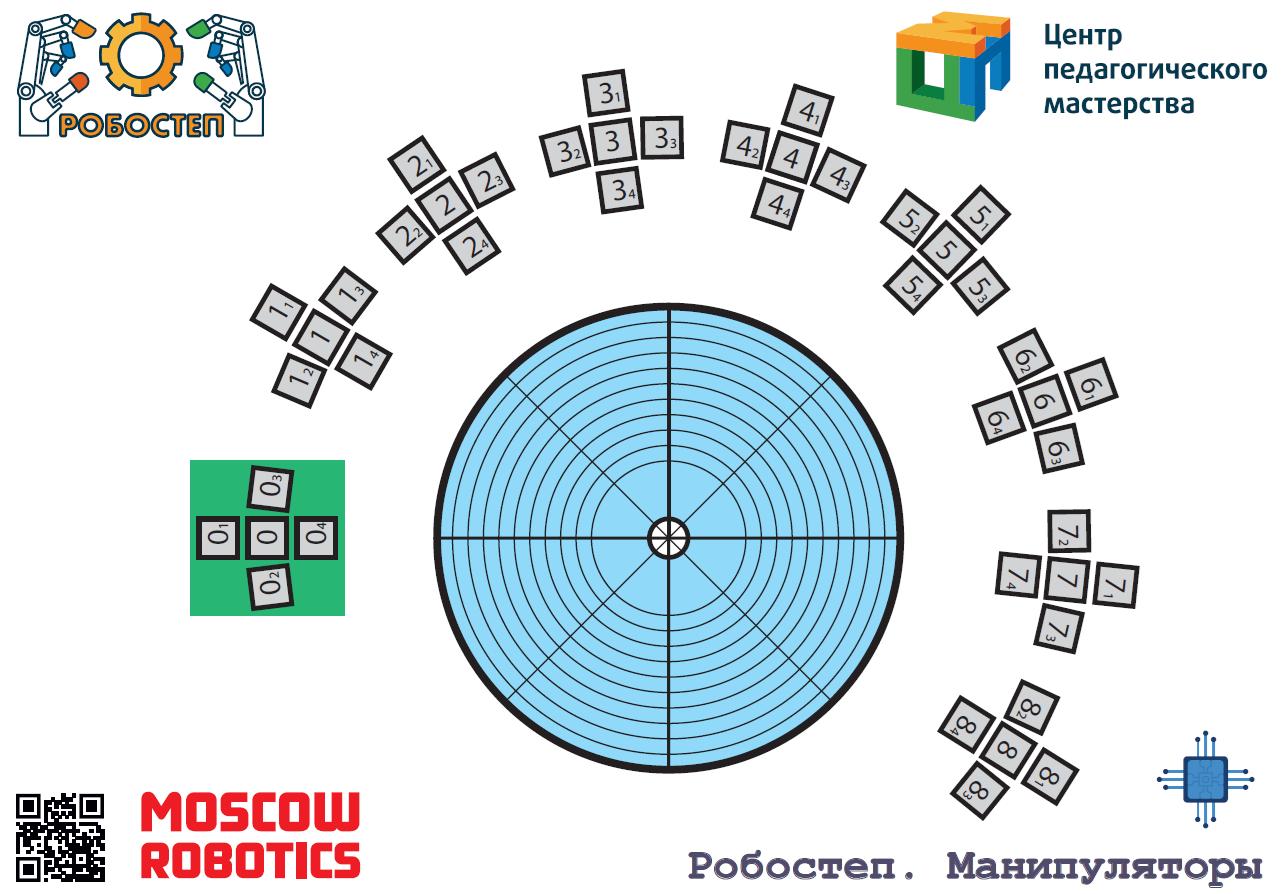
Манипуляторы |
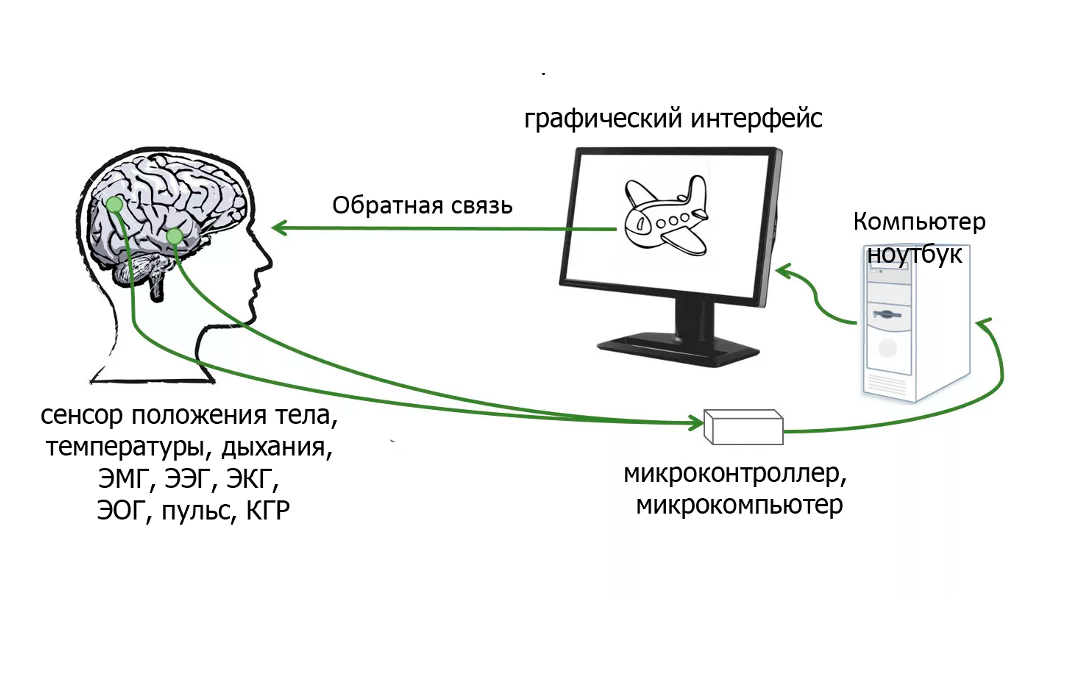
Нейро-Биоуправление |
 |
 |
 |
| Движение квадрокоптера с выполнением мини-задач, таких как маневры на поле, развороты и зависание на месте. |
Автономное управление манипулятором для выполнения задач по перемещению объектов и построению конструкций. | Управление виртуальным объектом с использованием нейро-биосигналов и биологической обратной связи. |
| Форма проведения: очно Необходимое оборудование: квадрокоптер с дистанционным управлением, защитные дуги для лопастей установленные на квадрокоптере, защитные очки для участников |
Форма проведения: очно Необходимое оборудование: стационарный манипулятор, способный перемещать и точно устанавливать объекты согласно регламенту |
Форма проведения: очно Необходимое оборудование: компьютер с графическим интерфейсом, контроллер, сенсоры нейро-биосигналов |
| Регламент Макеты | Регламент Макет | Регламент |